
La raccolta dell’uva da tavola rappresenta una delle fasi più critiche e delicate della filiera produttiva, caratterizzata da un’elevata necessità di manodopera e da complesse operazioni legate alla fragilità dei grappoli e alle variabili condizioni ambientali. Attualmente, questa attività viene svolta esclusivamente in modo manuale, richiedendo tempi lunghi e costi elevati. Per rispondere a queste sfide, l’implementazione di sistemi robotici avanzati potrebbe rappresentare un punto di svolta, non con l’intento di sostituire completamente il lavoro umano, ma di supportare l’operatore, velocizzando e ottimizzando le operazioni in campo.
In questo contesto, un team di ricercatori del Dipartimento di Ingegneria Meccanica del Politecnico di Hong Kong e del Ministero dell’Istruzione della provincia di Zhejiang, ha realizzato un sistema innovativo per la raccolta meccanizzata dell’uva da tavola. Questo progetto punta a superare le sfide tecniche legate alla manipolazione di grappoli fragili in un ambiente agricolo non strutturato, sfruttando le più avanzate tecnologie di visione artificiale, robotica di precisione e intelligenza artificiale.
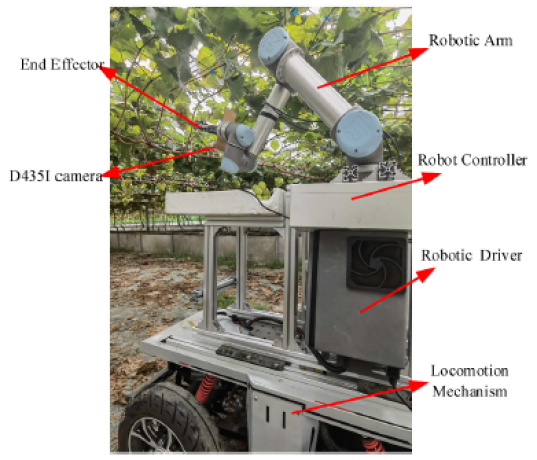
Hardware del robot per la raccolta
Varietà di uva e strumentazione utilizzata
Il sistema sviluppato per la raccolta meccanizzata dell’uva si basa su una combinazione di tecnologie avanzate per garantire un’operazione rapida ed efficiente. Uno dei fulcri del robot è una telecamera che acquisisce immagini in tempo reale, che vengono poi elaborate dal modulo di elaborazione centrale. Il robot è equipaggiato con un braccio robotico e un meccanismo di locomozione su ruote, che gli permettono di muoversi autonomamente nel vigneto e raccogliere i grappoli. Le informazioni sulla posizione dei grappoli vengono rilevate in tempo reale, permettendo al sistema di eseguire la raccolta con alta precisione.
Nel caso specifico di questo studio, sono stati utilizzati grappoli della varietà Shine Muscat, una varietà apprezzata per il suo sapore dolce e la sua difficoltà di separazione dallo sfondo, grazie alla colorazione verde simile alla vegetazione circostante. Le uve sono state coltivate con un sistema di allevamento a pergola, che permette di distribuire uniformemente la luce solare e favorisce una migliore accessibilità ai grappoli durante la raccolta.
ESP-YOLO: l’algoritmo per la raccolta meccanizzata dell’uva da tavola
Il vero cuore tecnologico di questo progetto èl’algoritmo ESP-YOLO (Efficient Speeded-up YOLO), una versione ottimizzata di YOLO (You Only Look Once), progettato per il riconoscimento in tempo reale degli oggetti nelle immagini.
Il modello YOLO originale è stato sviluppato per rilevare oggetti in immagini con grande rapidità, ma ha alcune limitazioni quando viene eseguito su piattaforme con un hardware meno potente, come nel caso di robot agricoli.
ESP-YOLO affronta queste limitazioni introducendo modifiche nell’architettura del modello:
- ottimizzazione della rete di base, ESP-YOLO utilizza un modulo chiamato ELSAN (Efficient Layer Aggregation Networks) per sostituire alcune strutture pesanti di YOLO. Questo significa che il modello è in grado di elaborare le immagini più rapidamente, senza compromettere troppo la qualità del rilevamento;
- meccanismo di attenzione (SE – Squeeze-and-Excitation), l’algoritmo integra blocchi Squeeze-and-Excitation (SE), che migliorano l’attenzione del modello sui dettagli più rilevanti nelle immagini. In altre parole, il sistema è più preciso nel riconoscere gli oggetti di interesse (in questo caso, i grappoli d’uva), anche in presenza di ostacoli o quando gli oggetti sono parzialmente nascosti;
- velocità di inferenza, una delle caratteristiche fondamentali di ESP-YOLO è la velocità con cui è in grado di fare previsioni. In un contesto come la raccolta meccanizzata dell’uva, è cruciale che il sistema possa identificare rapidamente i grappoli per guidare il robot nella raccolta. Grazie all’ottimizzazione, ESP-YOLO è in grado di eseguire queste operazioni in tempo reale, permettendo al robot di muoversi e agire in modo autonomo durante la raccolta.
In sintesi, ESP-YOLO è un modello avanzato e altamente ottimizzato che consente ai robot di rilevare in modo rapido e preciso i grappoli d’uva, anche in ambienti complessi, senza compromettere le prestazioni, rendendolo particolarmente adatto per applicazioni agricole automatizzate.

Immagini di grappoli di uva nei vigneti, da sinistra verso destra: nascosti, sovrapposti e a distanza
Addestramento dell’algoritmo e acquisizione delle immagini
Per addestrare l’algoritmo, sono state raccolte oltre 1400 immagini di uva da tavola, scattate in diverse condizioni ambientali e angolazioni. L’algoritmo è stato addestrato a riconoscere i grappoli anche quando parzialmente nascosti o sovrapposti, grazie all’uso di un dataset arricchito con immagini etichettate manualmente. Questa diversificazione nelle immagini ha permesso al modello di acquisire una capacità di riconoscimento robusta, in grado di adattarsi alle varie sfide che si presentano nei vigneti reali.
Risultati promettenti per la raccolta meccanizzata dell’uva
I risultati ottenuti con ESP-YOLO sono estremamente promettenti: il sistema ha raggiunto un’accuratezza del 96,3% nel riconoscimento dei grappoli d’uva, anche in scenari complessi come la sovrapposizione e l’occlusione. Inoltre, la velocità di 45 millisecondi per immagine lo rende perfetto per applicazioni in tempo reale, come la raccolta automatica.
Questi risultati non solo dimostrano l’affidabilità del sistema, ma ne evidenziano il potenziale per migliorare l’efficienza della raccolta meccanizzata dell’uva, riducendo i tempi e i costi operativi.
Il futuro della raccolta meccanizzata
Nonostante il progetto sia ancora in fase di perfezionamento, i progressi finora sono notevoli. È interessante notare che non si tratta di un caso isolato: nel 2020 è stato avviato anche il progetto italiano “Canopies“, un’altra iniziativa dedicata alla raccolta meccanizzata dell’uva, sottolineando l’interesse crescente per le soluzioni automatizzate in agricoltura.
Con il miglioramento continuo delle tecnologie di visione artificiale e robotica, si potrebbero avere ulteriori progressi nell’efficienza della raccolta. L’ottimismo per il futuro è giustificato, e la collaborazione tra ricerca e industria è essenziale per rendere l’automazione una risorsa sempre più preziosa per l’agricoltura in generale, e più nel dettaglio per comparti specifici come quello dell’uva da tavola.
Leggi anche: Avversità in vigneto, un robot per prevenirle
Donato Liberto
©uvadatavola.com